Hand Gesture Controlled Robot Using Accelerometer Project Report
Pdf Development Of Gesture Controlled Robot Using 3 Axis Accelerometer
Project Report On Hand Gesture Controlled Robot Part 2
Wireless Gesture Controlled Robot Full Project With Source Code
Hand Gesture Controlled Robot Arduino Project Hub
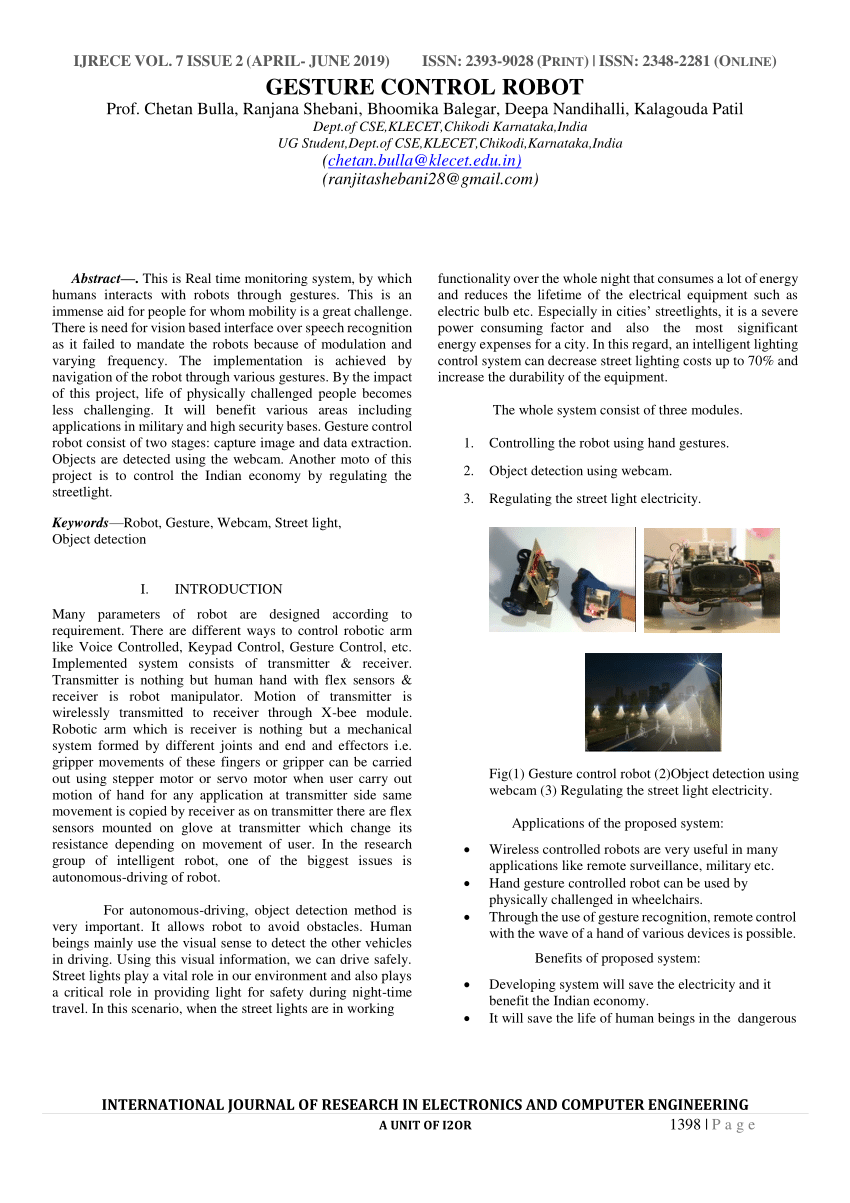
Pdf Gesture Control Robot
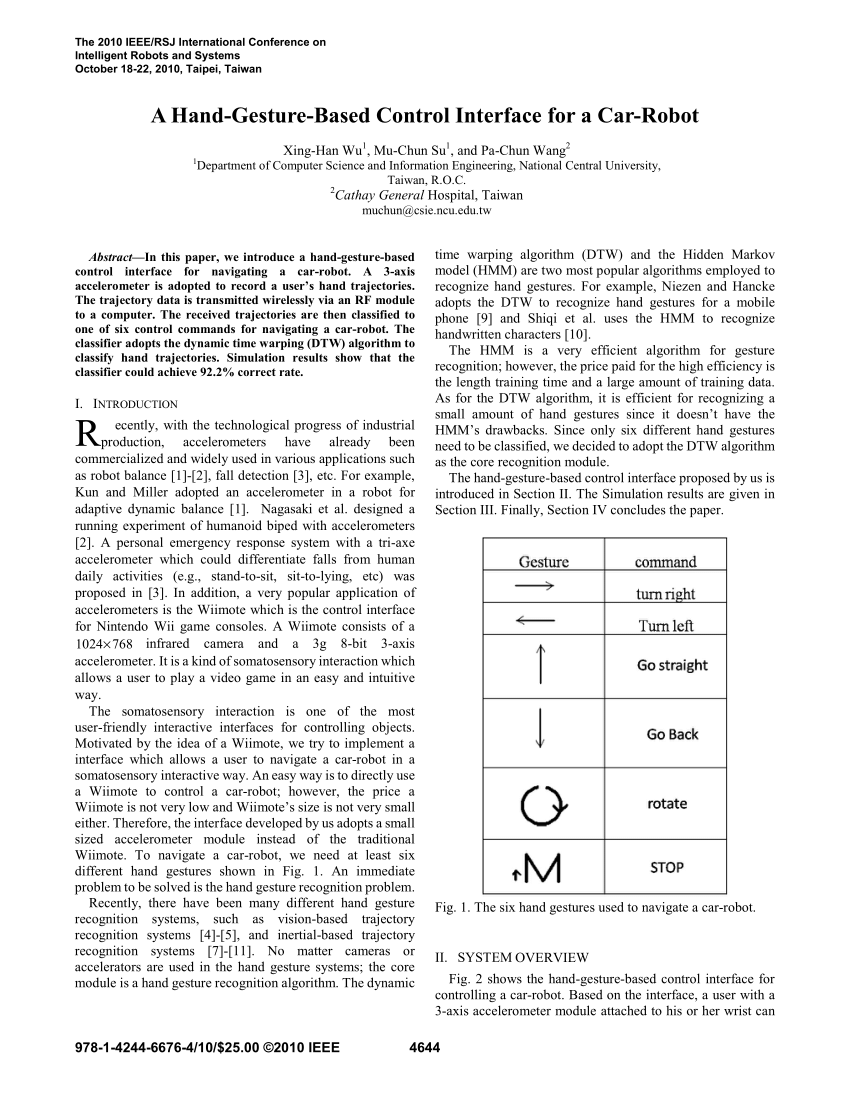
Pdf A Hand Gesture Based Control Interface For A Car Robot

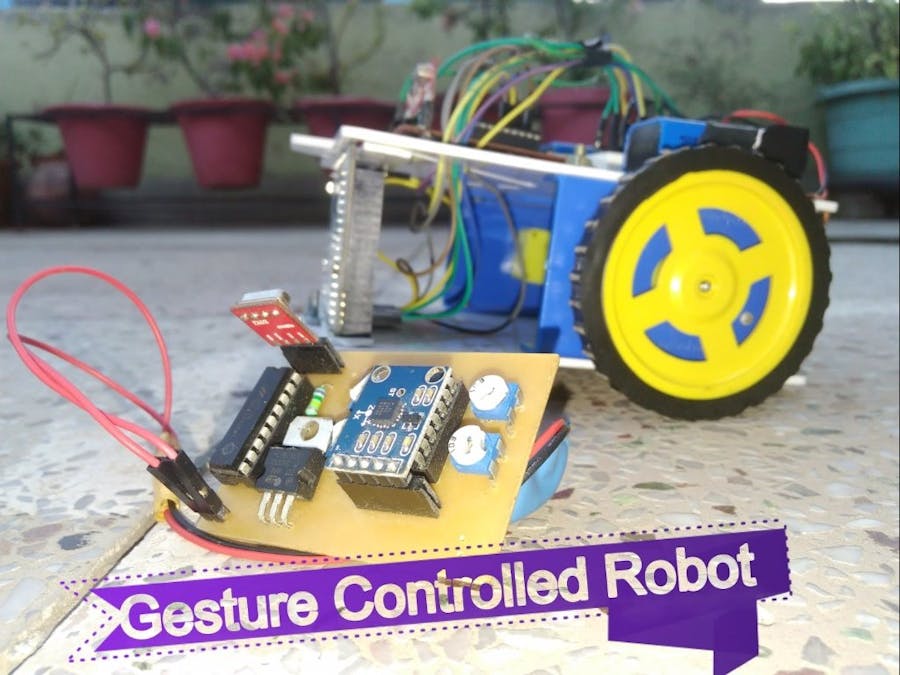
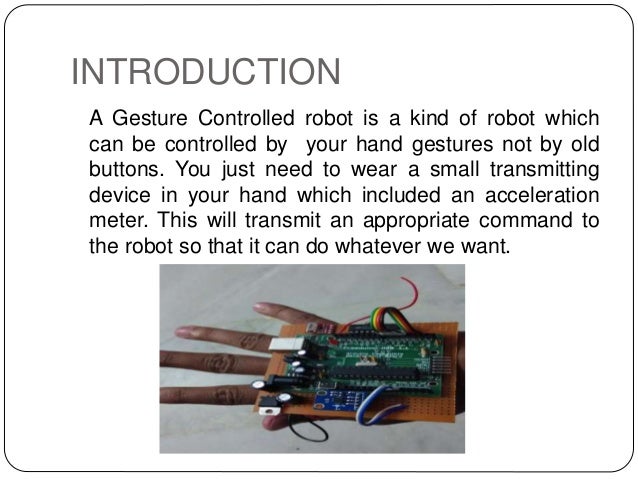
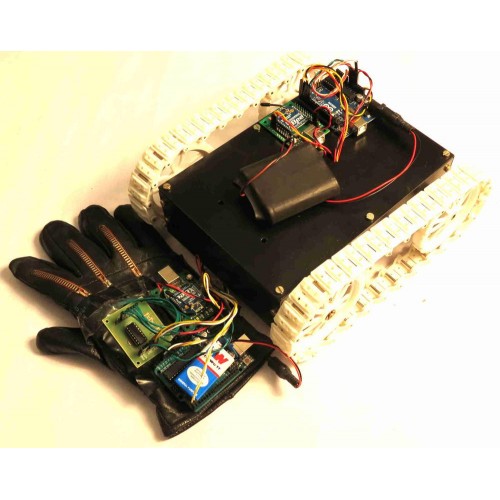
A gesture controlled robot is a kind of robot which can be controlled by your hand gestures not by old buttons you just need to wear a small transmitting device in your hand which included an acceleration meter this will transmit an appropriate command to the robot so that it can do whatever we want.
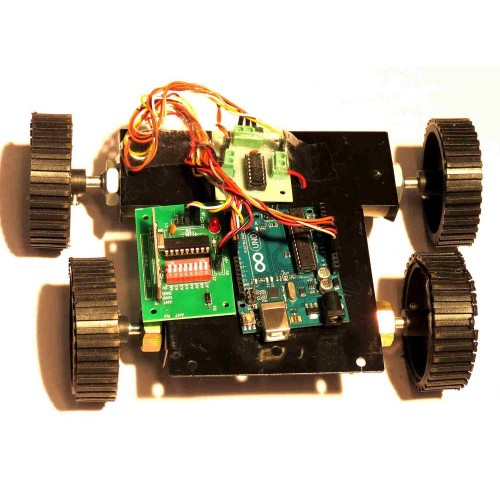
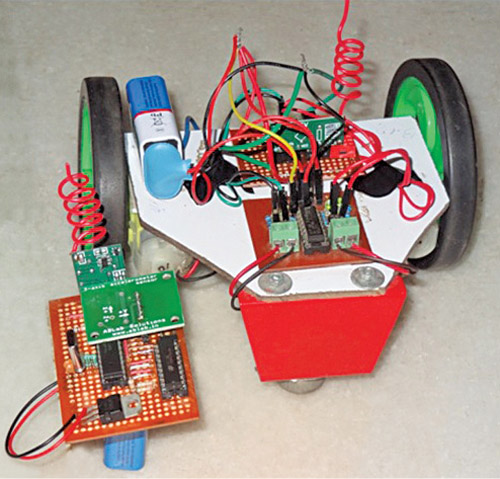
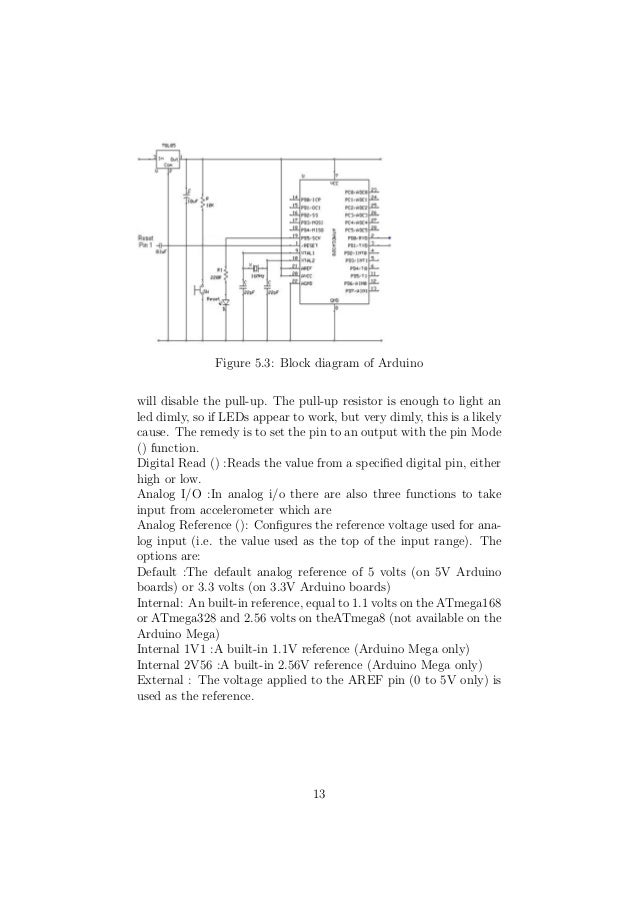
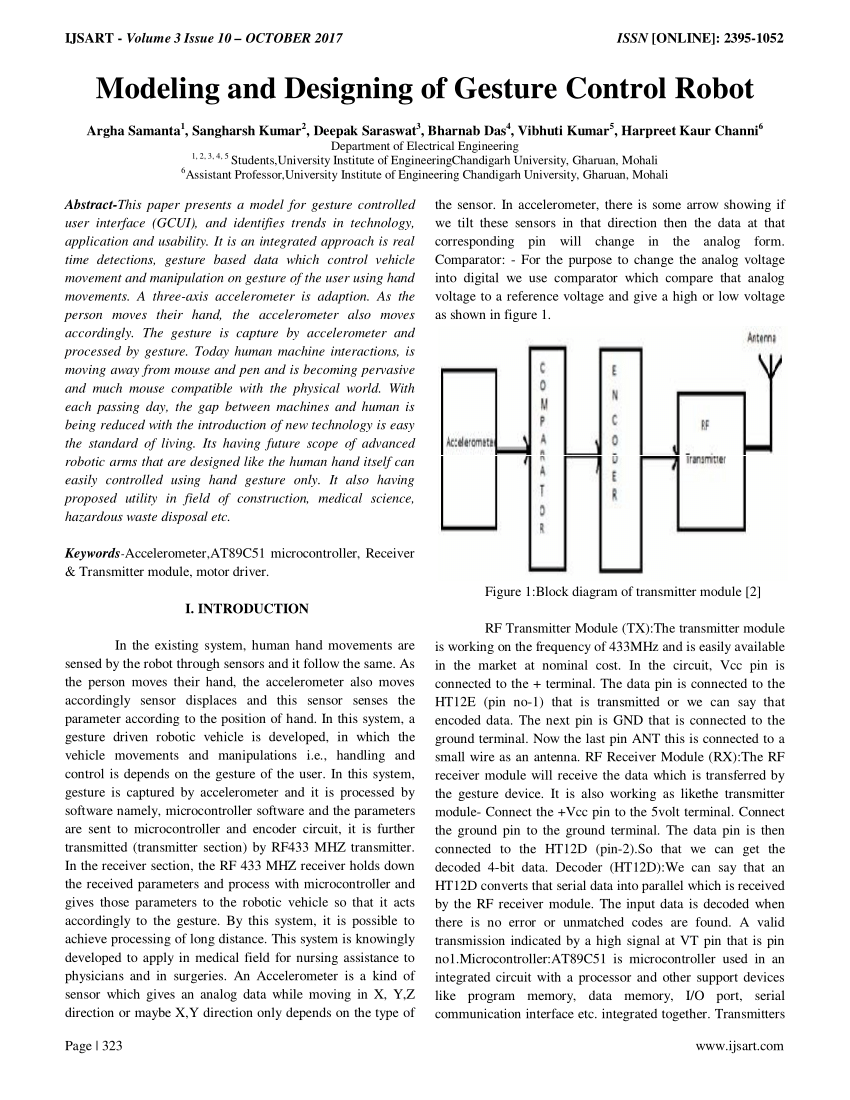
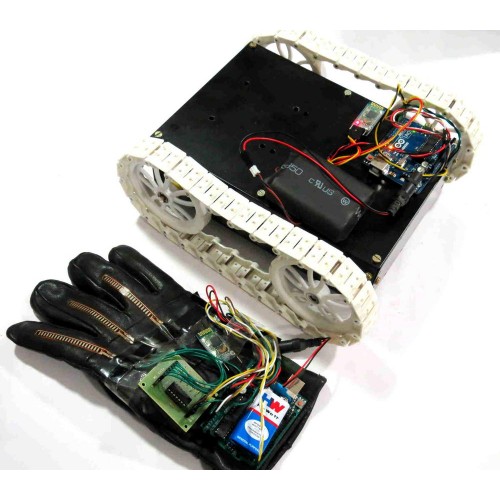
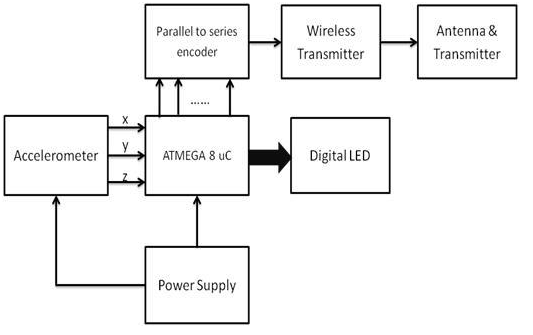
Hand gesture controlled robot using accelerometer project report. The main goal of this project is to control the movement of the robot with hand gesture using accelerometer. The orientation of the palm controls the motion of the robot car. Gesture controlled robot using arduino 2018 9 ambalika institute of management of technology college code 363 3 1 block diagram our gesture controlled robot works on the principle of accelerometer which records hand movements and sends that data to the comparator which assigns proper voltage levels to the recorded movements. The first part is the transmitter part remote in which the mpu6050 accelerometer sensor continuously sends signals to the receiver robot through arduino and nrf transmitter.
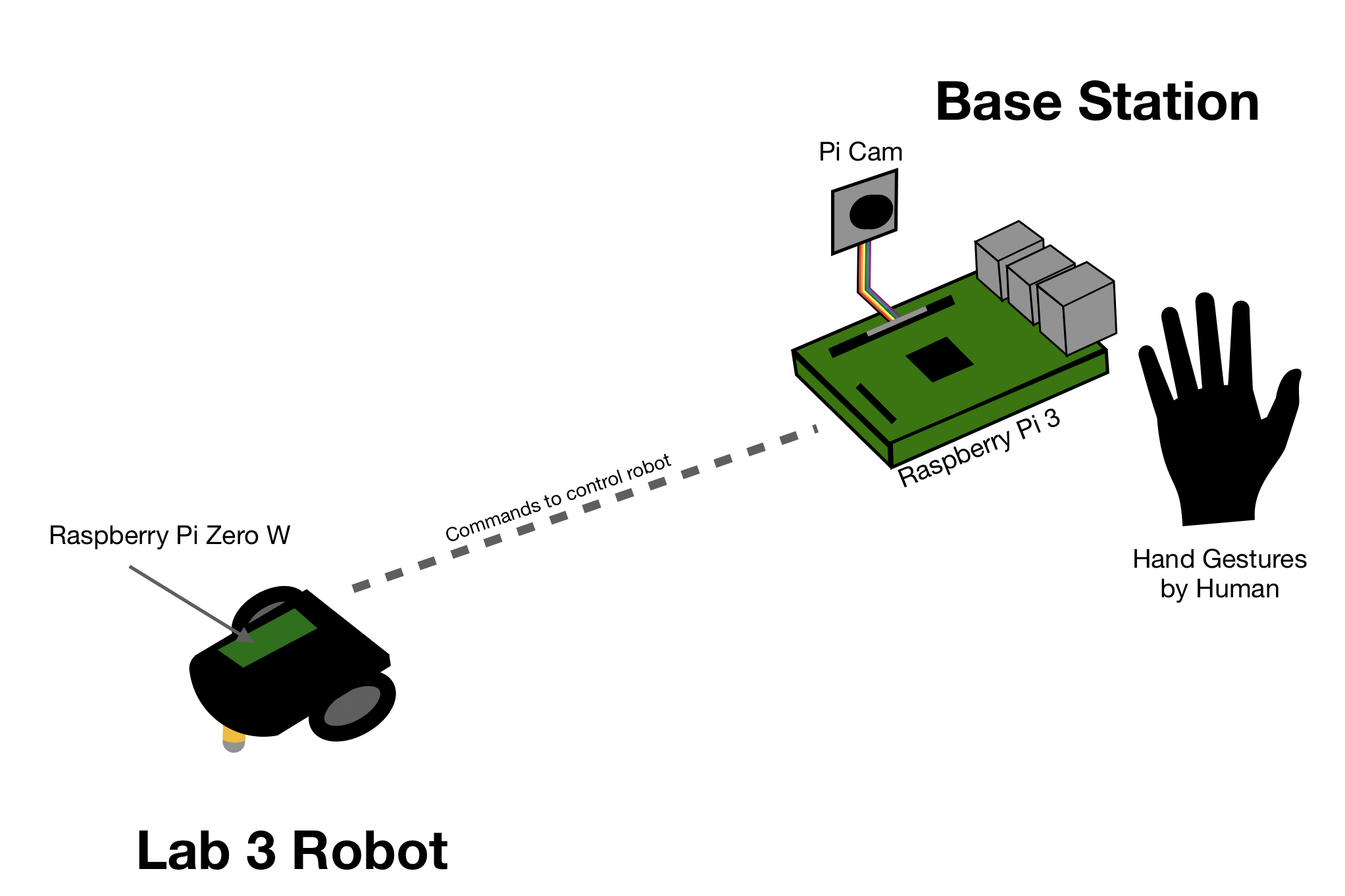
To understand the working of this arduino gesture control car let us divide this project into two parts. In this project we have used hand motion to drive the robot. So a new project is developed that is an accelerometer based gesture control robot. A survey a design of real time control robot system.
For this purpose we have used accelerometer which works on acceleration. But controlling the robot with a remote or a switch is quite complicated. Wireless gesture controlled robot wireless gesture controlled robot final year project report muhammad ahkam khan muhammad waqar session 2009 2013 supervised slideshare uses cookies to improve functionality and performance and to provide you with relevant advertising. In this wireless gesture controlled robot project we are going to control a robot using hand gestures.
This is an easy user friendly way to interact with robotic systems and robots. An analysis available at traffic police gesture recognition using accelerometer human machine interaction hmi. Wireless gesture control rbot. An accelerometer is used to detect the tilting position of your hand and a microcontroller gets different analogue values and generates command signals to control.
The concept behind it is simple. This gesture controlled robot uses arduino adxl335 accelerometer and rf transmitter receiver pair. We will divide the entire robot into 3 parts the transmitter the receiver and the robot. The different gestures that have been mapped to the direction of the bot are hand parallel to the ground stationary.
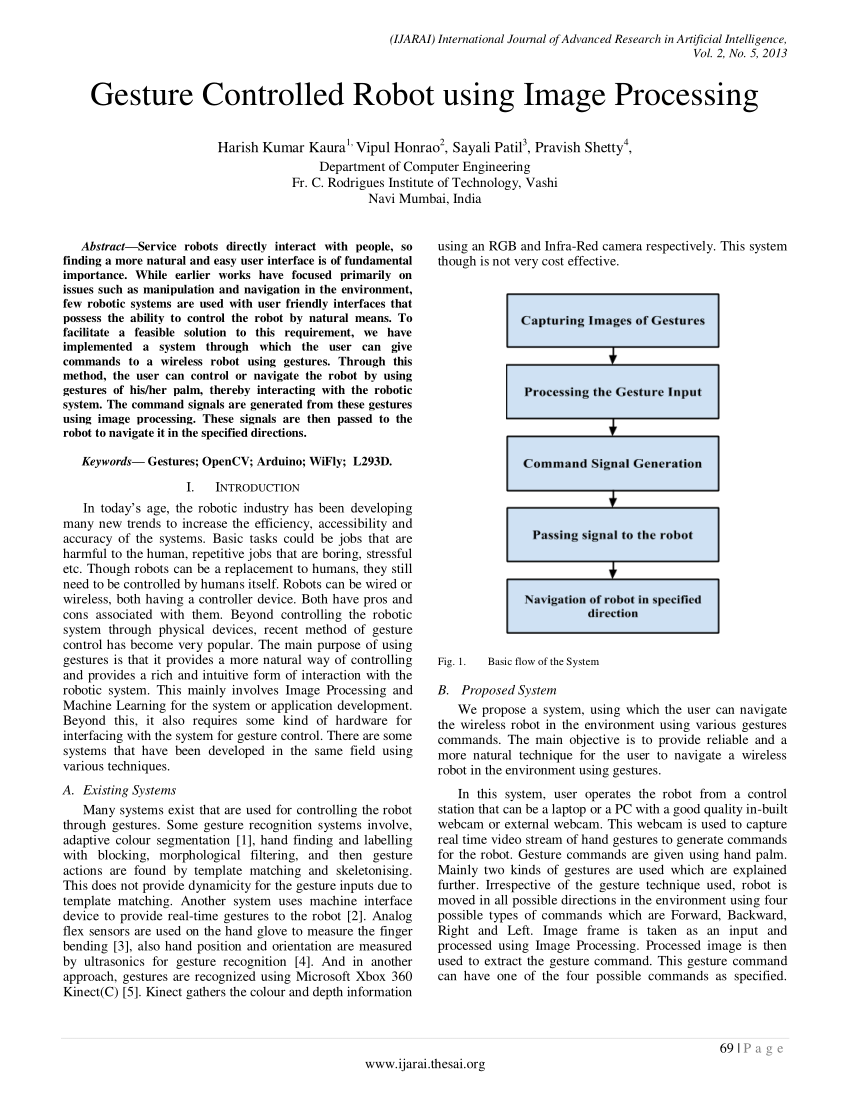
Pdf Gesture Controlled Robot Using Image Processing

Hand Gesture Controlled Robotic Vehicle Docsity

Pdf Gesture Controlled Robot Using Arduino And Android
Accelerometer Based Hand Gesture Controlled Robot Using Arduino

Pdf Design And Implementation Of A Wireless Gesture Controlled Robotic Arm With Vision

Gesture Control Robot Working With Applications
Http Www Ijsdr Org Papers Ijsdr1805055 Pdf
Pdf Gesture Controlled Mobile Robotic Arm Using Accelerometer
How To Make A Gesture Control Robot At Home Youtube Real Steel Humanoid Robot Robot
Pdf Design And Implementation Of Gesture Controlled Robotic Arm For Industrial Applications

Accelerometer Based Hand Gesture Controlled Robot Using Arduino Arduino Arduino Projects Accelerometers

Pdf Development Of Gesture Controlled Robot Using Flex Sensor And Accelerometer Roshan Gabhane And V H Somkuwar Gmail Com Somkuwar Academia Edu
Gesture Controlled Robot Arduino Project Hub

Accelerometer Based Hand Gesture Controlled Robot

Block Diagram Of Transmitter Accelerometers Led Power Supply Block Diagram
Pdf Modeling And Designing Of Gesture Control Robot
Gesture Control Robot

Hand Gesture Controlled Robotic Arm Using Arduino Nano
Hand Gesture Controlled Robot

Robotic Vehicle Controlled By Hand Gesture Using Pic

Hand Gesture Controlled Robot Using Arduino Youtube

Gesture Controlled Robot Using Arduino And Bluetooth 6 Steps Instructables

Hand Gesture Control Robot Using Arduino

Making A Gesture Controlled Robot Using Your Smartphone Arduino Project Hub

Accelerometer Based Hand Gesture Controlled Robot Accelerometers How To Apply Switches
Flex Sensor Based Hand Gesture Controlled All Terrain Robot
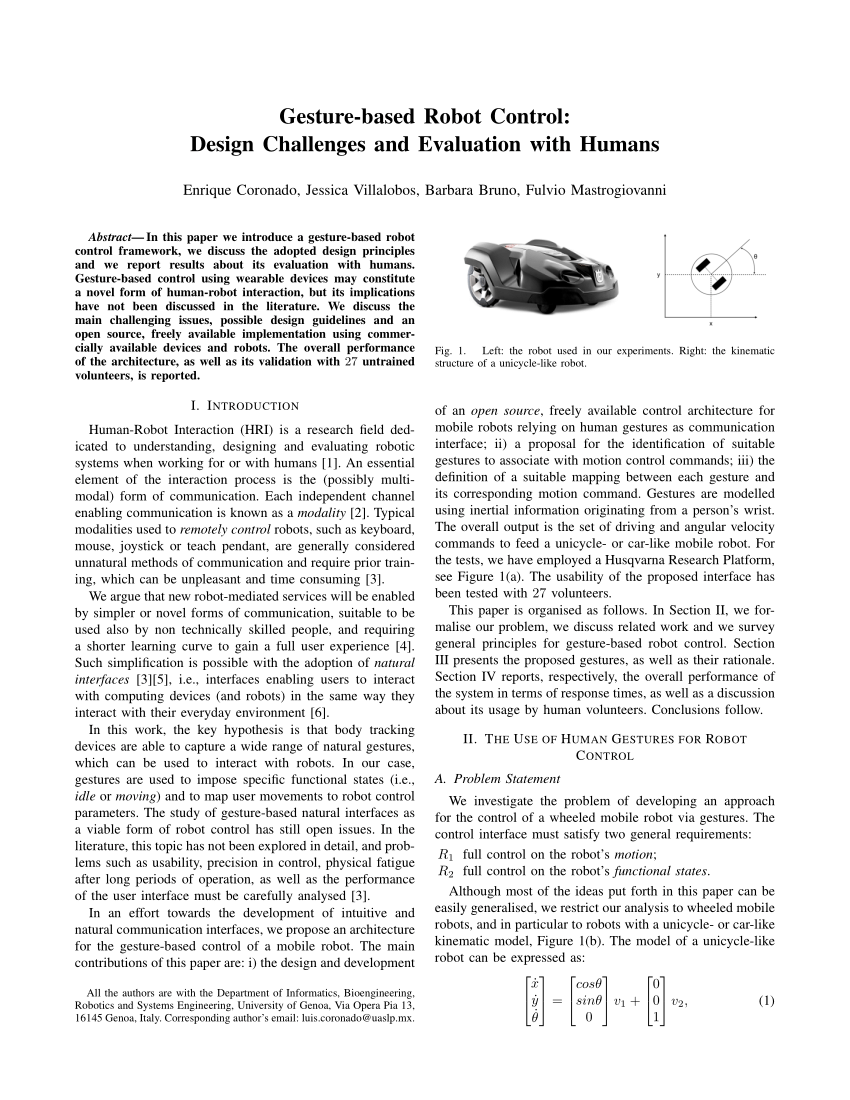
Pdf Gesture Based Robot Control Design Challenges And Evaluation With Humans
Pdf R3arm Gesture Controlled Robotic Arm For Remote Rescue Operation

How To Make A Gesture Control Robot At Home Youtube Cool Arduino Projects Arduino Projects Arduino Projects Diy
Flex Sensor Based Hand Gesture Controlled All Terrain Robot

Ch 7050 Here Is A High Level Block Diagram Of The Robot Code Download Diagram
Hand Gesture Controlled Robot

Hand Gesture Controlled Wheelchair Implant Medicine Wheelchair

Accelerometer Based Hand Gesture Controlled Robot With Avr Atmega16 Microcontroller Microcontrollers Accelerometers Circuit Diagram
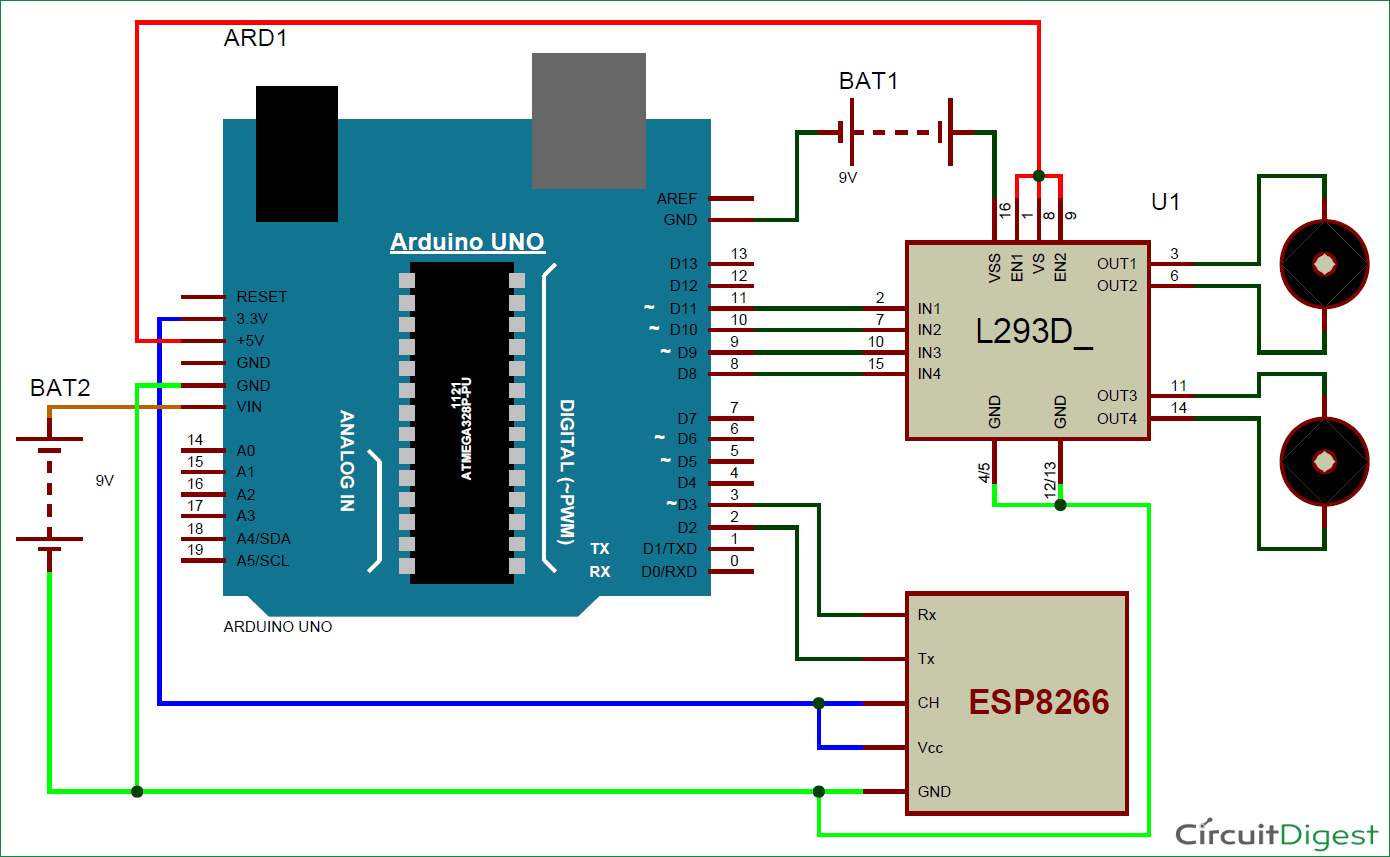
Arduino Based Wifi Controlled Robot

Hand Motion Controlled Robotic Arm

Gesture Control Car Using Mpu6050 And Arduino 7 Steps With Pictures Instructables

How To Design A Password Protected Accelerometer Based Hand Gesture Controlled Wireless Robot With Avr Atmega16 Microcontrollers Circuit Diagram Accelerometers

Pdf Gesture Controlled Robot Piyush Srivastava Academia Edu
Hand Gesture Controlled Robot Javatpoint

Hand Gesture Controlled Robot Using Arduino In 2020 Arduino Robot Control
Gesture Control Car
Https Www Ijeat Org Wp Content Uploads Papers V8i6s F10500886s19 Pdf